Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConsiderations for the Control Design of Augmentative Robots
Paper and Code
Oct 31, 2023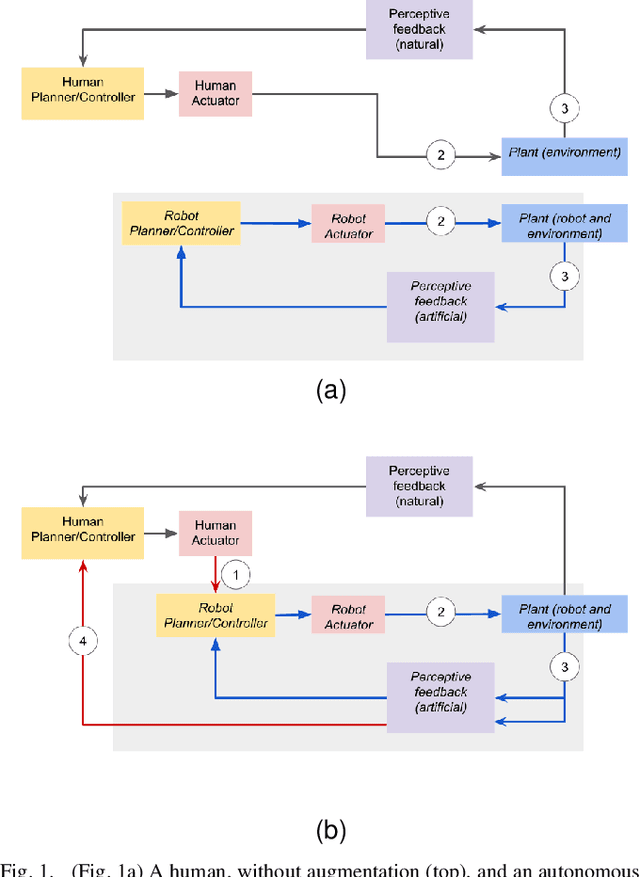
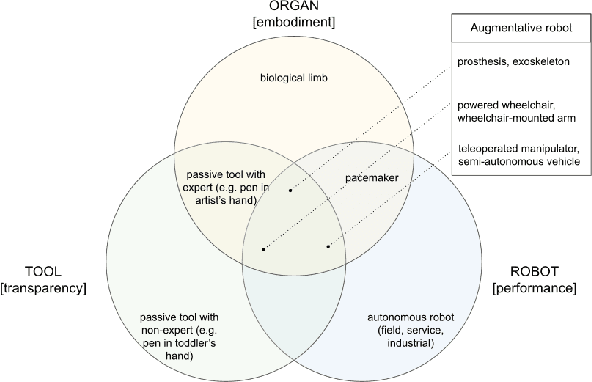
Robotic systems that are intended to augment human capabilities commonly require the use of semi-autonomous control and artificial sensing, while at the same time aiming to empower the user to make decisions and take actions. This work identifies principles and techniques from the literature that can help to resolve this apparent contradiction. It is postulated that augmentative robots must function as tools that have partial agency, as collaborative agents that provide conditional transparency, and ideally, serve as extensions of the human body.
* 7 pages. Presented at the IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS 2021) Workshop on Building and
Evaluating Ethical Robotic Systems, Prague, Czech Republic, 28-30 September
2021
View paper on