Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeComparing Correspondences: Video Prediction with Correspondence-wise Losses
Paper and Code
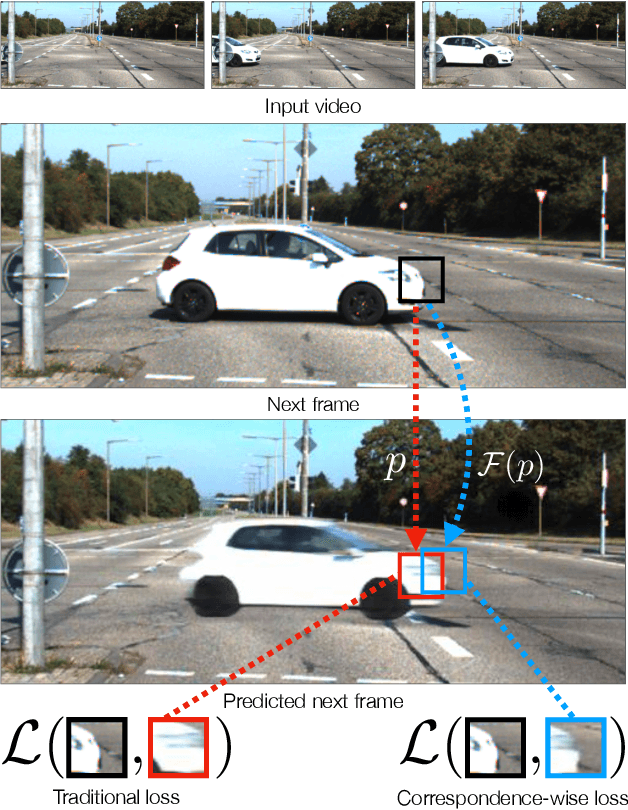
Today's image prediction methods struggle to change the locations of objects in a scene, producing blurry images that average over the many positions they might occupy. In this paper, we propose a simple change to existing image similarity metrics that makes them more robust to positional errors: we match the images using optical flow, then measure the visual similarity of corresponding pixels. This change leads to crisper and more perceptually accurate predictions, and can be used with any image prediction network. We apply our method to predicting future frames of a video, where it obtains strong performance with simple, off-the-shelf architectures.
* Website at http://dangeng.github.io/CorrWiseLosses
View paper on