 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCombining Physics-Based Domain Knowledge and Machine Learning using Variational Gaussian Processes with Explicit Linear Prior
Paper and Code
Jun 05, 2019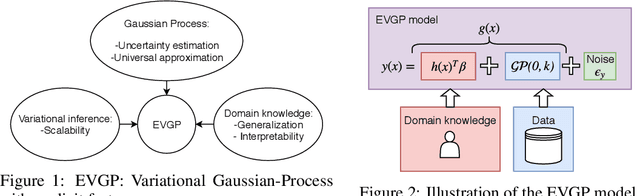

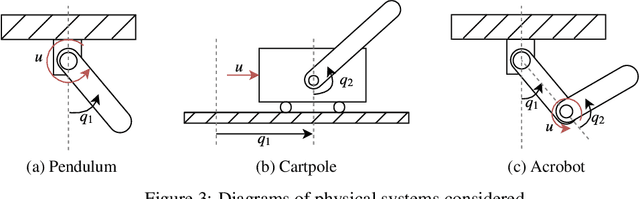
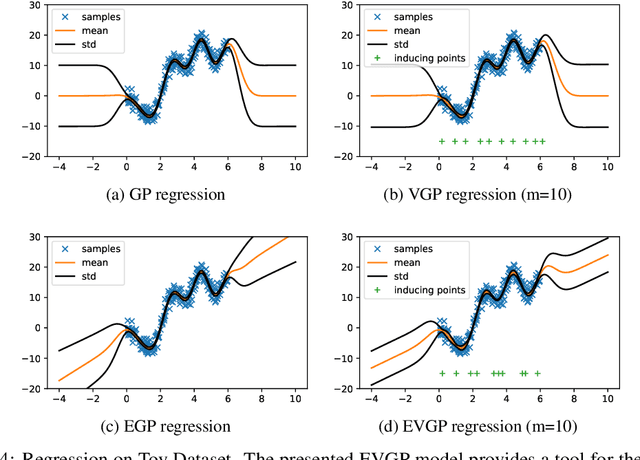
Centuries of development in natural sciences and mathematical modeling provide valuable domain expert knowledge that has yet to be explored for the development of machine learning models. When modeling complex physical systems, both domain knowledge and data contribute important information about the system. In this paper, we present a data-driven model that takes advantage of partial domain knowledge in order to improve generalization and interpretability. The presented model, which we call EVGP (Explicit Variational Gaussian Process), uses an explicit linear prior to incorporate partial domain knowledge while using data to fill in the gaps in knowledge. Variational inference was used to obtain a sparse approximation that scales well to large datasets. The advantages include: 1) using partial domain knowledge to improve inductive bias (assumptions of the model), 2) scalability to large datasets, 3) improved interpretability. We show how the EVGP model can be used to learn system dynamics using basic Newtonian mechanics as prior knowledge. We demonstrate that using simple priors from partially defined physics models considerably improves performance when compared to fully data-driven models.