 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision-Free Poisson Motion Planning in Ultra High-Dimensional Molecular Conformation Spaces
Paper and Code
Jul 25, 2016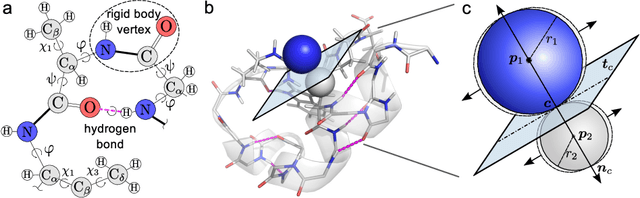



The function of protein, RNA, and DNA is modulated by fast, dynamic exchanges between three-dimensional conformations. Conformational sampling of biomolecules with exact and nullspace inverse kinematics, using rotatable bonds as revolute joints and non-covalent interactions as holonomic constraints, can accurately characterize these native ensembles. However, sampling biomolecules remains challenging owing to their ultra-high dimensional configuration spaces, and the requirement to avoid (self-) collisions, which results in low acceptance rates. Here, we present two novel mechanisms to overcome these limitations. First, we introduced temporary constraints between near-colliding links. The resulting constraint varieties instantaneously redirect the search for collision-free conformations, and couple motions between distant parts of the linkage. Second, we adapted a randomized Poisson-disk motion planner, which prevents local oversampling and widens the search, to ultra-high dimensions. We evaluated our algorithm on several model systems. Our contributions apply to general high-dimensional motion planning problems in static and dynamic environments with obstacles.