Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCollision Avoidance Robotics Via Meta-Learning (CARML)
Paper and Code
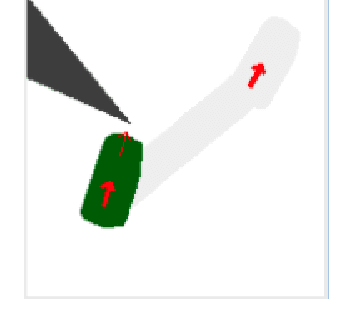
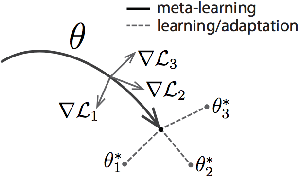

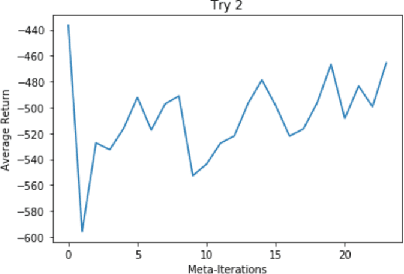
This paper presents an approach to exploring a multi-objective reinforcement learning problem with Model-Agnostic Meta-Learning. The environment we used consists of a 2D vehicle equipped with a LIDAR sensor. The goal of the environment is to reach some pre-determined target location but also effectively avoid any obstacles it may find along its path. We also compare this approach against a baseline TD3 solution that attempts to solve the same problem.
View paper on