 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCamera Calibration by Global Constraints on the Motion of Silhouettes
Paper and Code
Apr 14, 2017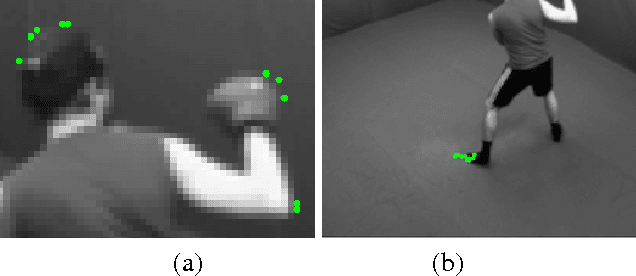

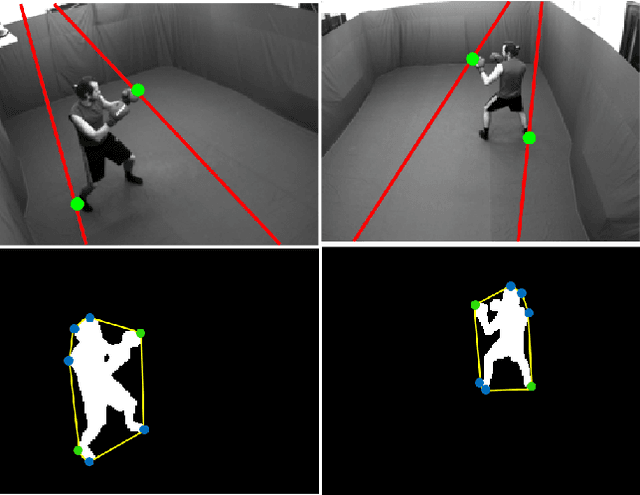

We address the problem of epipolar geometry using the motion of silhouettes. Such methods match epipolar lines or frontier points across views, which are then used as the set of putative correspondences. We introduce an approach that improves by two orders of magnitude the performance over state-of-the-art methods, by significantly reducing the number of outliers in the putative matching. We model the frontier points' correspondence problem as constrained flow optimization, requiring small differences between their coordinates over consecutive frames. Our approach is formulated as a Linear Integer Program and we show that due to the nature of our problem, it can be solved efficiently in an iterative manner. Our method was validated on four standard datasets providing accurate calibrations across very different viewpoints.