 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBioinspired Straight Walking Task-Space Planner
Paper and Code
Oct 18, 2018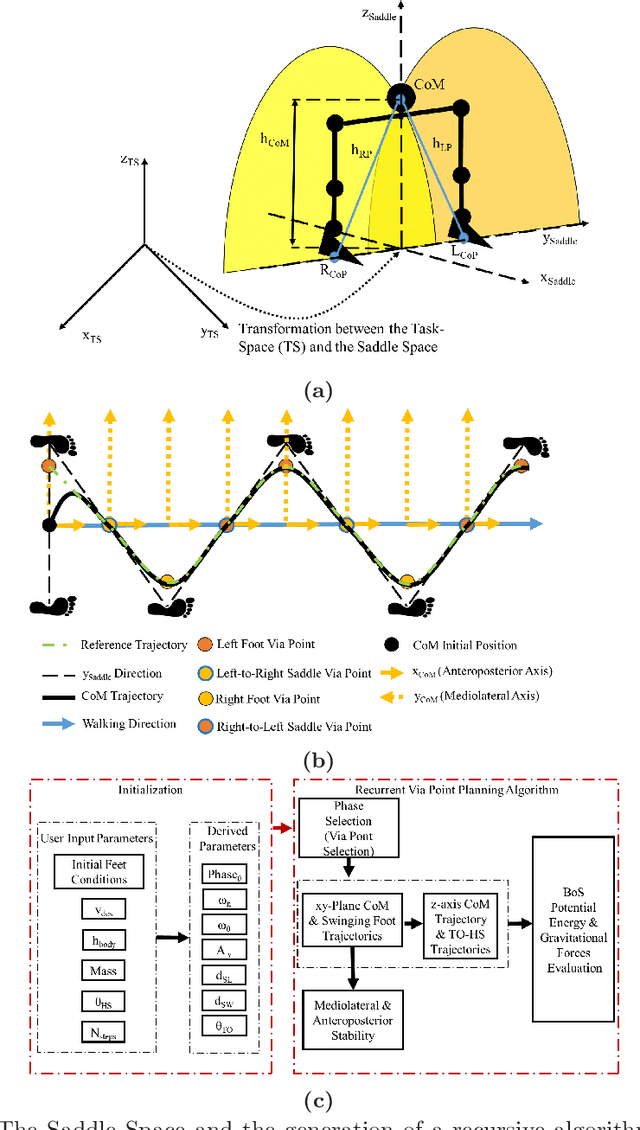

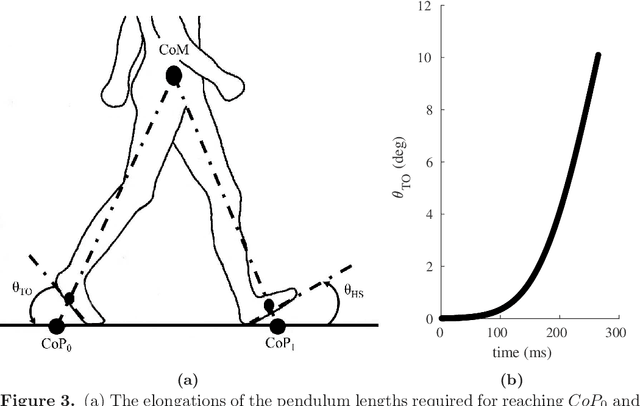
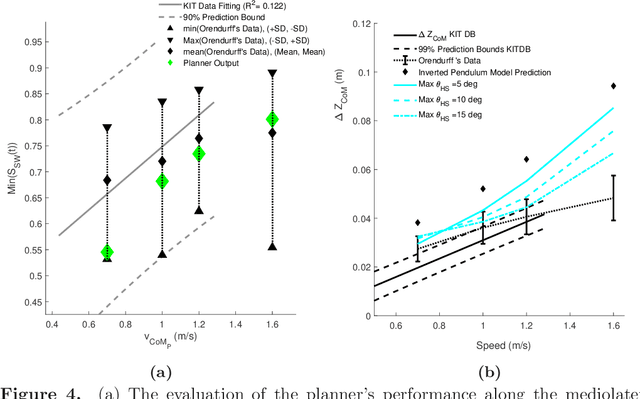
Despite the improvements in humanoids robots over the last decades, they are still far behind compared to human locomotor abilities. Their performance limitations can be partially attributed to the hardware, but the primary constraint has been the understanding of bipedal dynamics. Based on the recently developed model of potential energy for bipedal structures, this work proposes a task-space planner for human-like straight locomotion. The proposed architecture is based on potential energy model and employs locomotor strategies from human data as a reference behaviour. The model generates Centre of Mass (CoM) trajectories, foot swing trajectories and the Base of Support (BoS). Their calculation relies on the knowledge of the desired speed, initial posture, height, weight, number of steps and the angle between the foot and the ground during heel-strike. The data show that the proposed architecture can generate behaviour in line with human walking strategies for both the CoM and the foot swing. Although the planned trajectory is not smooth compared to human trajectories, the proposed model significantly reduces the error in the estimation of the CoM vertical trajectory. Moreover, the proposed planner can generate a single stride in less than 140 ms and sequences of 10 strides in less than 600 ms, it allows an online task-space planning for locomotion. Lastly, the proposed architecture is also supported by analogies with current theories on human motor control of locomotion.