 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBio-Inspired Design of Artificial Striated Muscles Composed of Sarcomere-Like Contraction Units (preprint)
Paper and Code
Mar 17, 2021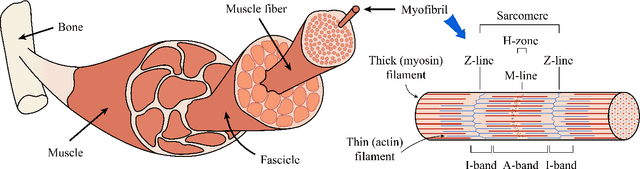

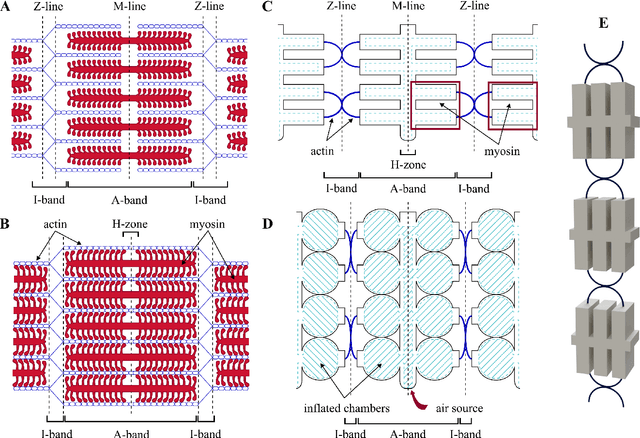
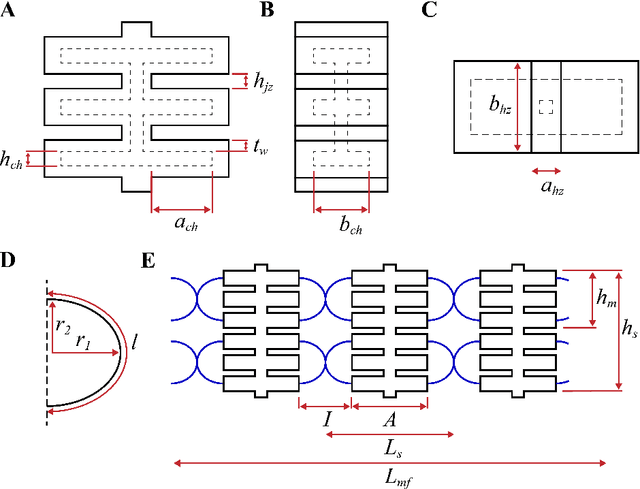
Biological muscles have always attracted robotics researchers due to their efficient capabilities in compliance, force generation, and mechanical work. Many groups are working on the development of artificial muscles, however, state-of-the-art methods still fall short in performance when compared with their biological counterpart. Muscles with high force output are mostly rigid, whereas traditional soft actuators take much space and are limited in strength and producing displacement. In this work, we aim to find a reasonable trade-off between these features by mimicking the striated structure of skeletal muscles. For that, we designed an artificial pneumatic myofibril composed of multiple contraction units that combine stretchable and inextensible materials. Varying the geometric parameters and the number of units in series provides flexible adjustment of the desired muscle operation. We derived a mathematical model that predicts the relationship between the input pneumatic pressure and the generated output force. A detailed experimental study is conducted to validate the performance of the proposed bio-inspired muscle.