Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-Level Online Control without Regret
Paper and Code
Feb 18, 2017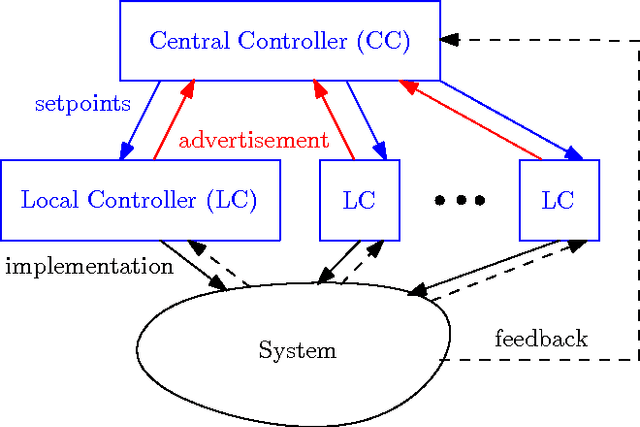
This paper considers a bi-level discrete-time control framework with real-time constraints, consisting of several local controllers and a central controller. The objective is to bridge the gap between the online convex optimization and real-time control literature by proposing an online control algorithm with small dynamic regret, which is a natural performance criterion in nonstationary environments related to real-time control problems. We illustrate how the proposed algorithm can be applied to real-time control of power setpoints in an electrical grid.
View paper on