 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Navigation of MAVs in Unknown Cluttered Environments
Paper and Code
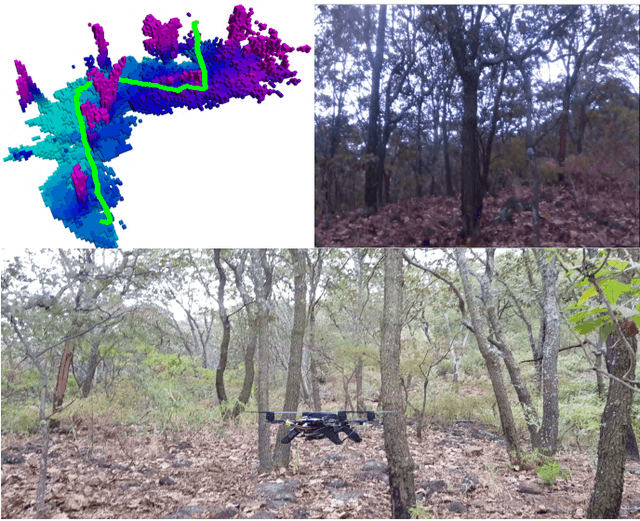
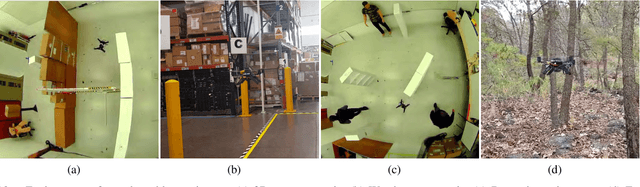
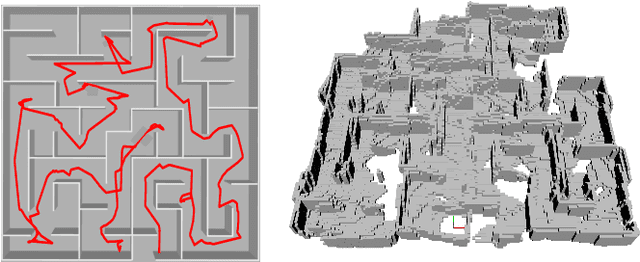
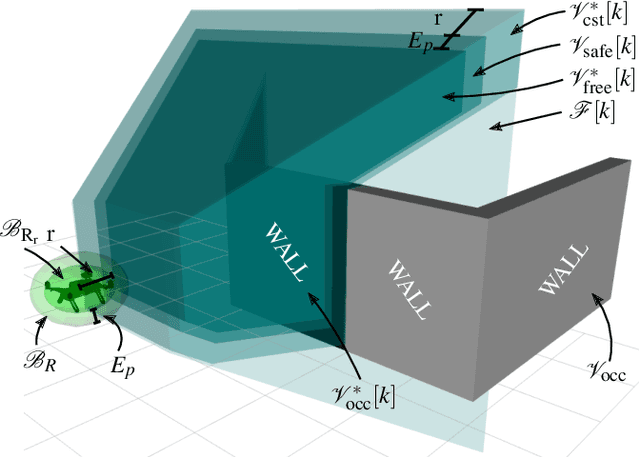
This paper presents an autonomous navigation framework for reaching a goal in unknown 3D cluttered environments. The framework consists of three main components. First, a computationally efficient method for mapping the environment from the disparity measurements obtained from a depth sensor. Second, a stochastic method to generate a path to a given goal, taking into account field of view constraints on the space that is assumed to be safe for navigation. Third, a fast method for the online generation of motion plans, taking into account the robot's dynamic constraints, model and environmental uncertainty and disturbances. To highlight the contribution with respect to the available literature, we provide a qualitative and quantitative comparison with state of the art methods for reaching a goal and for exploration in unknown environments, showing the superior performance of our approach. To illustrate the effectiveness of the proposed framework, we present experiments in multiple indoors and outdoors environments running the algorithm fully on board and in real-time, using a robotic platform based on the Intel Ready to Fly drone kit, which represents the implementation in the most frugal platform for navigation in unknown cluttered environments demonstrated to date. See video at https://youtu.be/Wq0e7vF6nZM