 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic maneuver detection and tracking of space objects in optical survey scenarios based on stochastic hybrid systems formulation
Paper and Code
Sep 16, 2021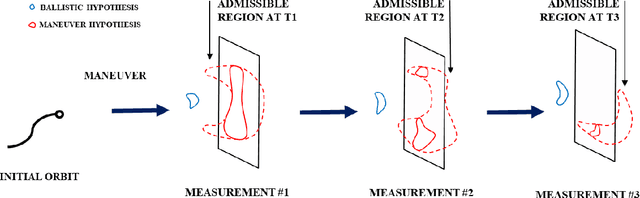

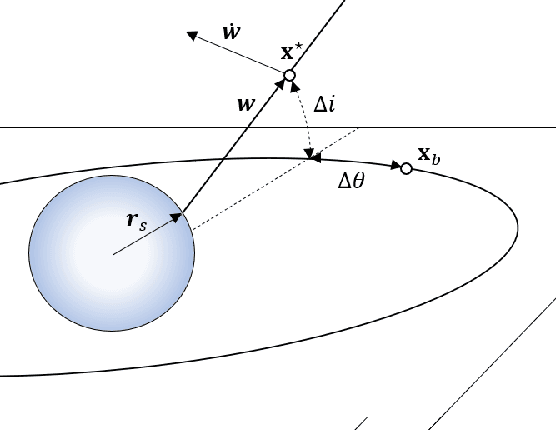
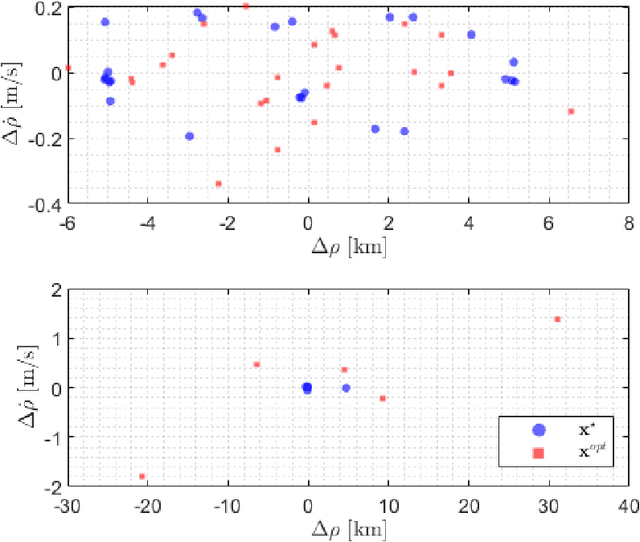
The state space representation of active resident space objects can be posed in the form of a stochastic hybrid system. Satellite maneuvers may be accounted for according to control cost or heuristical considerations, yet it is possible to jointly consider a combination of both. In this work, Sequential Monte Carlo filtering techniques are applied to the maneuvering target tracking problem in an optical survey scenario, where the maneuver control inputs are characterized in a Bayesian inference process. Due to the scarcity of data inherent to space surveillance and tracking, model switching probabilities are not estimated but derived from the ability of the state representation to fit incoming measurements. A Markov Chain Monte Carlo sampling scheme is used to explore the region assumed accessible to the object in terms of the hypothesized post-maneuver observation and a novel and efficient control distance metric. Results are obtained for a simulated optical survey scenario, and comparisons are drawn with respect to a moving horizon least-squares estimator. The proposed framework is proved to allow for a capable implementation of an automated online maneuver detection algorithm, thus contributing to the reduction of uncertainty in the state of active space objects.