 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic Generation of Machine Learning Synthetic Data Using ROS
Paper and Code
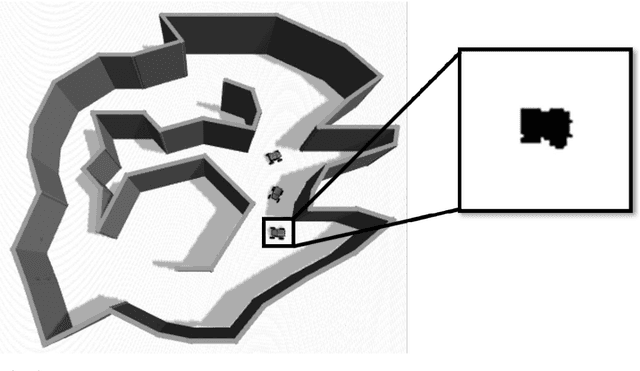
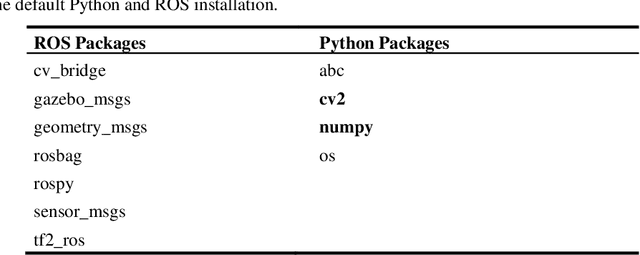
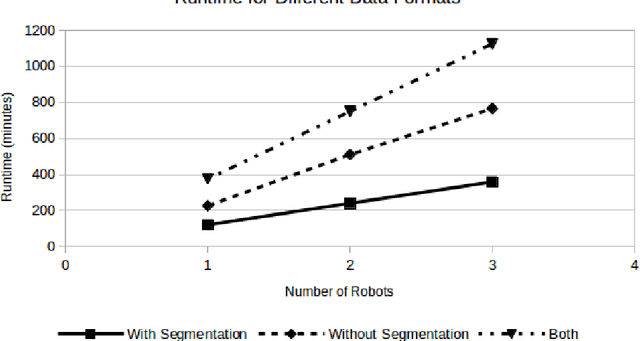
Data labeling is a time intensive process. As such, many data scientists use various tools to aid in the data generation and labeling process. While these tools help automate labeling, many still require user interaction throughout the process. Additionally, most target only a few network frameworks. Any researchers exploring multiple frameworks must find additional tools orwrite conversion scripts. This paper presents an automated tool for generating synthetic data in arbitrary network formats. It uses Robot Operating System (ROS) and Gazebo, which are common tools in the robotics community. Through ROS paradigms, it allows extensive user customization of the simulation environment and data generation process. Additionally, a plugin-like framework allows the development of arbitrary data format writers without the need to change the main body of code. Using this tool, the authors were able to generate an arbitrarily large image dataset for three unique training formats using approximately 15 min of user setup time and a variable amount of hands-off run time, depending on the dataset size. The source code for this data generation tool is available at https://github.com/Navy-RISE-Lab/nn_data_collection