 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAppSign: Multi-level Approximate Computing for Real-Time Traffic Sign Recognition in Autonomous Vehicles
Paper and Code
Nov 17, 2024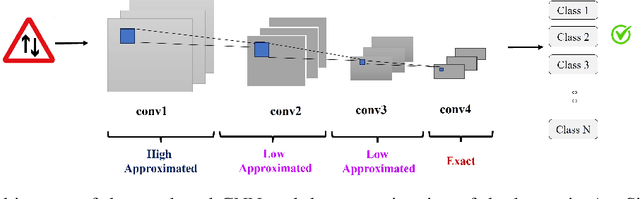
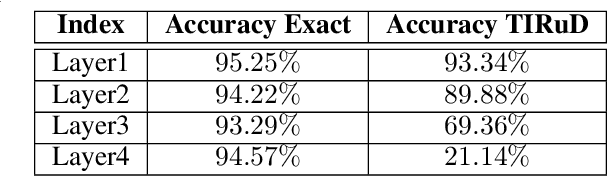

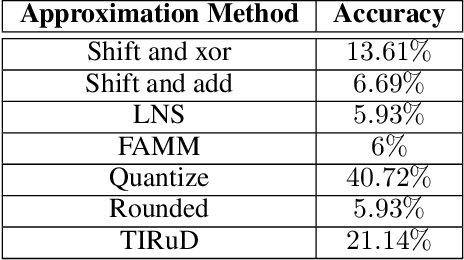
This paper presents a multi-level approximate computing approach for real-time traffic sign recognition in autonomous vehicles called AppSign. Since autonomous vehicles are real-time systems, they must gather environmental information and process them instantaneously to respond properly. However, due to the limited resources of these systems, executing computation-intensive algorithms such as deep-learning schemes that lead to precise output is impossible and takes a long time. To tackle this, imprecise computation schemes compromise the complexity and real-time operations. In this context, AppSign presents a multi-level approximate computing scheme to balance the accuracy and computation cost of the computation-intensive schemes and make them appropriate for real-time applications. AppSign is applied to the CNN-based traffic sign recognition unit by approximating the convolution operation of CNN which is the primal solution for image processing applications. In AppSign a novel approximate multiplication method called "TIRuD" is proposed that truncates the operations while keeping the accuracy acceptable. Moreover, it provides the adaptive approximation of the underlying CNN by involving various levels of computation and considering different approximation methods. The efficiency of the proposed AppSign, in real-time traffic sign recognition, is evaluated through several experiments. Based on these experiments, our proposed TIRuD reduces the accuracy by about $10\%$ while saving execution time about $64\%$ over the exact multiplication, averagely. Moreover, employing our proposed hierarchical approximation in various model layers outperforms the exact computation $27.78\%$ considering "AoC" that joins accuracy and computation cost in a parameter.