 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnthropomorphic Twisted String-Actuated Soft Robotic Gripper with Tendon-Based Stiffening
Paper and Code
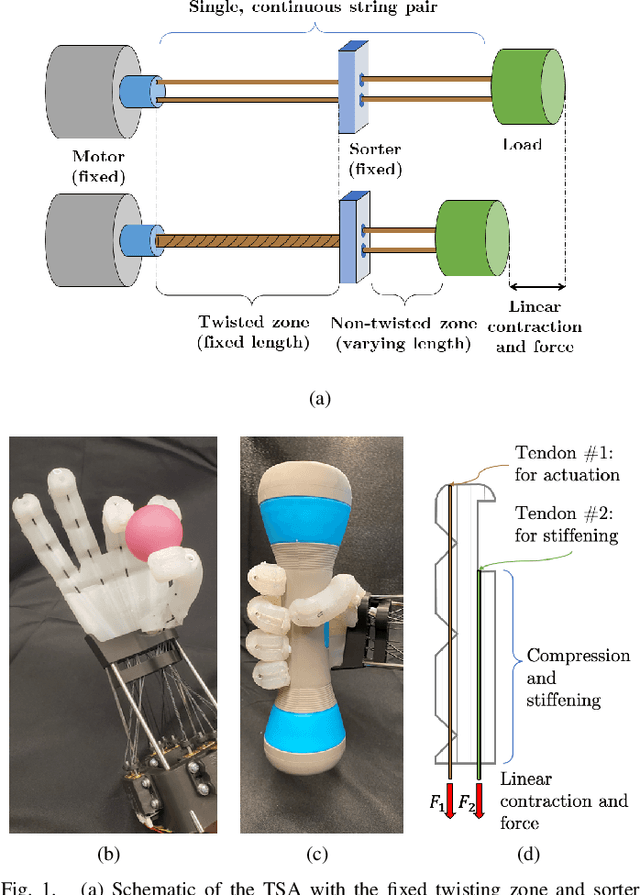
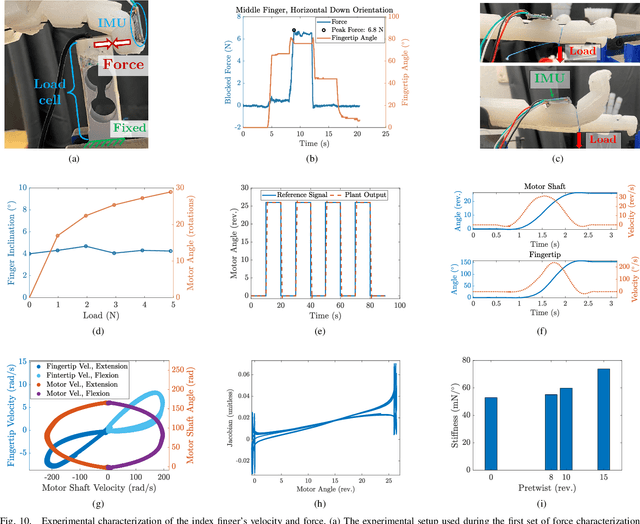
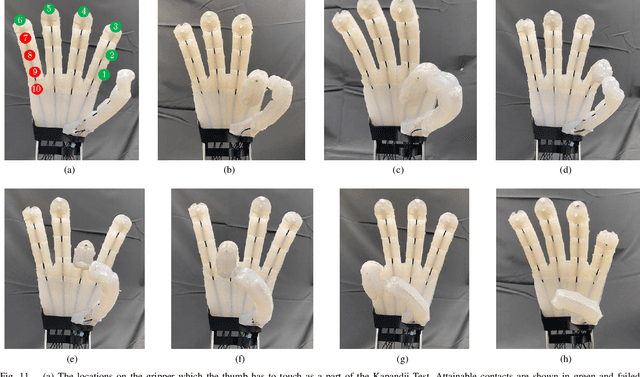
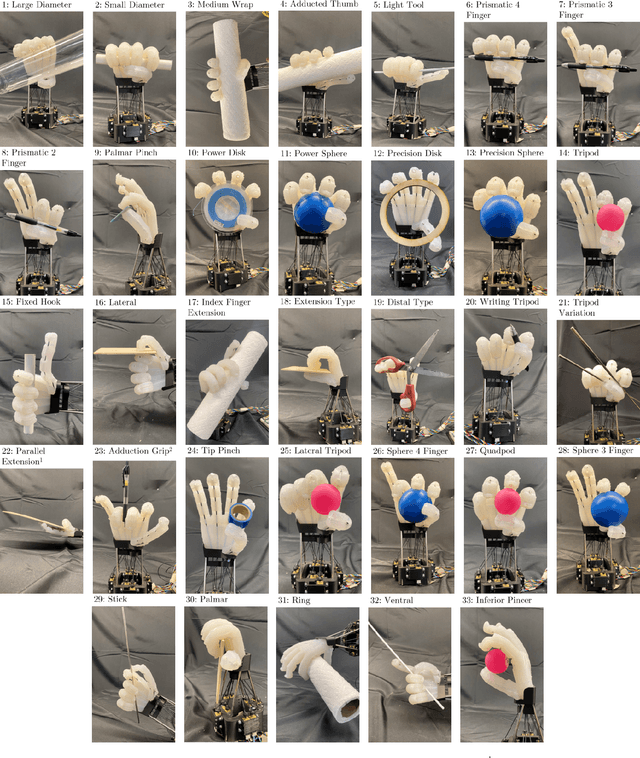
Realizing high-performance soft robotic grippers is challenging because of the inherent limitations of the soft actuators and artificial muscles that drive them. Although existing soft robotic grippers exhibit acceptable performance, their design and fabrication are still an open problem. This paper explores twisted string actuators (TSAs) to drive a soft robotic gripper. TSAs have been widely used in numerous robotic applications, but their inclusion in soft robots has been limited. The proposed design of the gripper was inspired by the human hand, with four fingers and a thumb. Tunable stiffness was implemented in the fingers by using antagonistic TSAs. The fingers' bending angles, actuation speed, blocked force output, and stiffness tuning were experimentally characterized. The gripper was able to achieve a score of 6 on the Kapandji test, and was also to achieve 31 of the 33 grasps of the Feix GRASP taxonomy. A comparison study revealed that the proposed gripper exhibited equivalent or superior performance compared to other similar grippers.