 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Approach to Model Interest for Planetary Rover through Dezert-Smarandache Theory
Paper and Code
Jul 14, 2012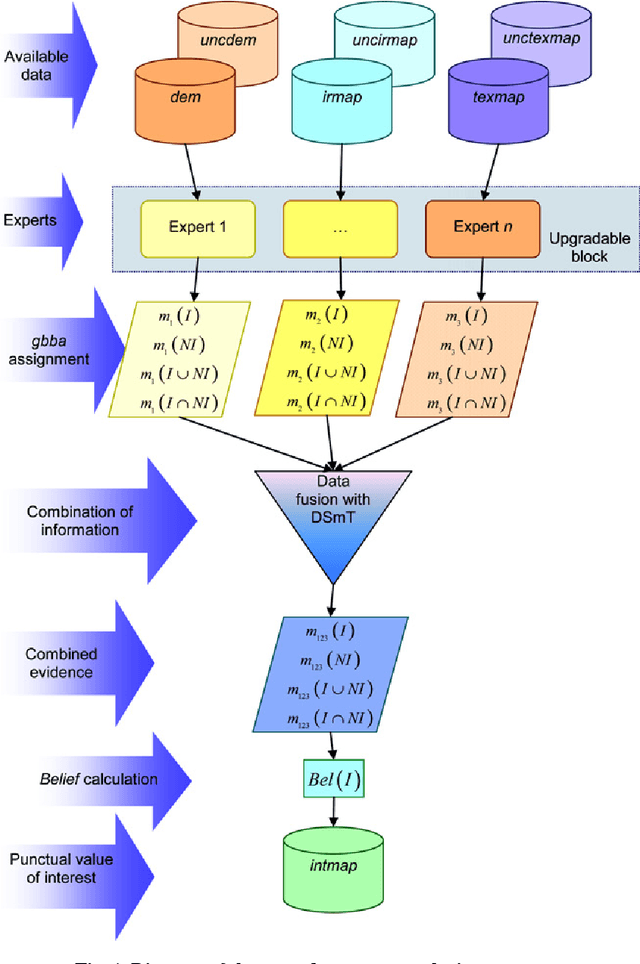
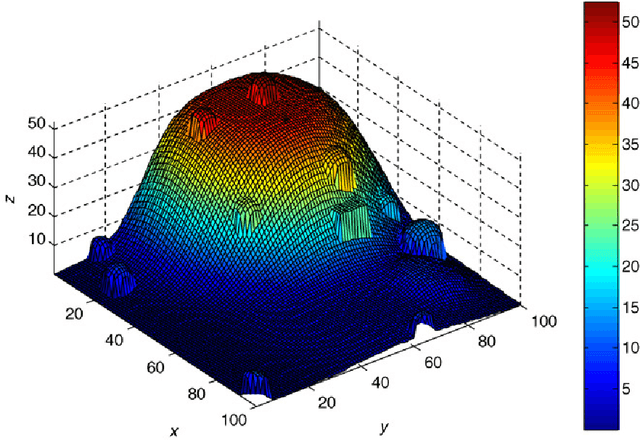
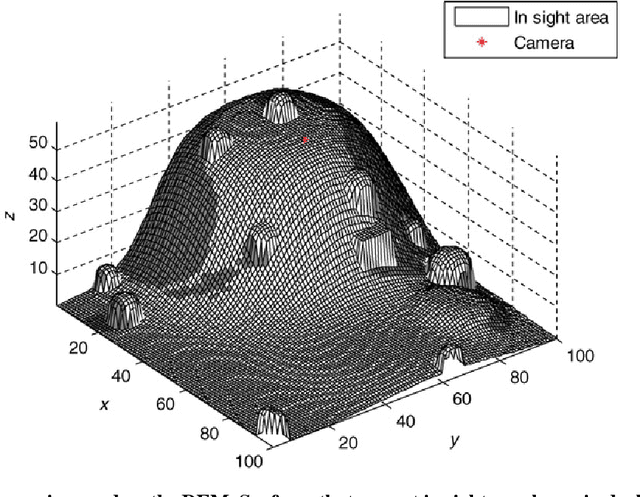
In this paper, we propose an approach for assigning an interest level to the goals of a planetary rover. Assigning an interest level to goals, allows the rover autonomously to transform and reallocate the goals. The interest level is defined by data-fusing payload and navigation information. The fusion yields an "interest map", that quantifies the level of interest of each area around the rover. In this way the planner can choose the most interesting scientific objectives to be analyzed, with limited human intervention, and reallocates its goals autonomously. The Dezert-Smarandache Theory of Plausible and Paradoxical Reasoning was used for information fusion: this theory allows dealing with vague and conflicting data. In particular, it allows us directly to model the behavior of the scientists that have to evaluate the relevance of a particular set of goals. The paper shows an application of the proposed approach to the generation of a reliable interest map.