 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn adaptive closed-loop ECoG decoder for long-term and stable bimanual control of an exoskeleton by a tetraplegic
Paper and Code
Jan 25, 2022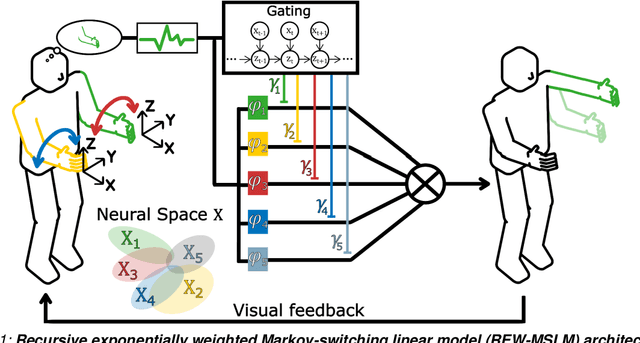
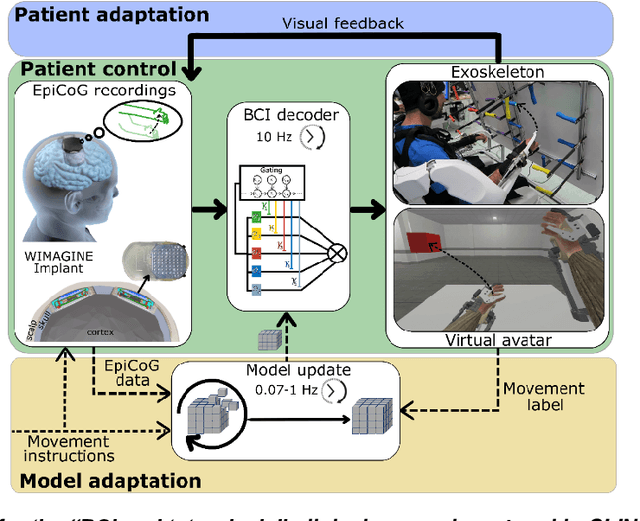
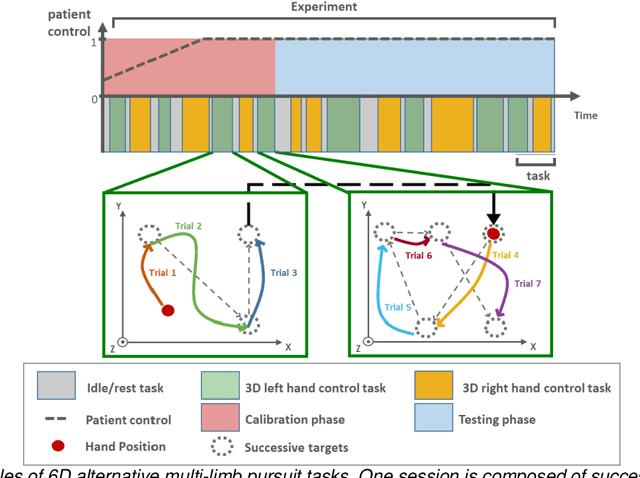
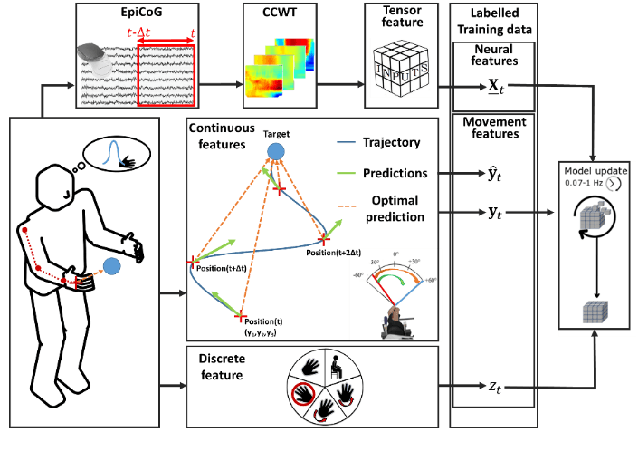
Brain-computer interfaces (BCIs) still face many challenges to step out of laboratories to be used in real-life applications. A key one persists in the high performance control of diverse effectors for complex tasks, using chronic and safe recorders. This control must be robust over time and of high decoding performance without continuous recalibration of the decoders. In the article, asynchronous control of an exoskeleton by a tetraplegic patient using a chronically implanted epidural electrocorticography (EpiCoG) implant is demonstrated. For this purpose, an adaptive online tensor-based decoder: the Recursive Exponentially Weighted Markov-Switching multi-Linear Model (REW-MSLM) was developed. We demonstrated over a period of 6 months the stability of the 8-dimensional alternative bimanual control of the exoskeleton and its virtual avatar using REW-MSLM without recalibration of the decoder.