 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAddressing the issue of stochastic environments and local decision-making in multi-objective reinforcement learning
Paper and Code
Nov 16, 2022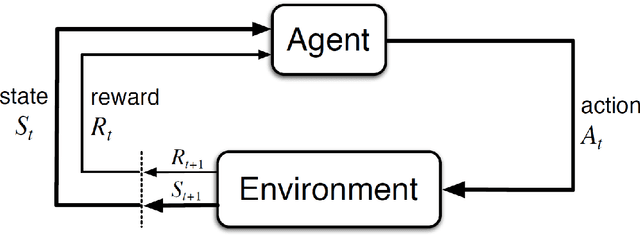



Multi-objective reinforcement learning (MORL) is a relatively new field which builds on conventional Reinforcement Learning (RL) to solve multi-objective problems. One of common algorithm is to extend scalar value Q-learning by using vector Q values in combination with a utility function, which captures the user's preference for action selection. This study follows on prior works, and focuses on what factors influence the frequency with which value-based MORL Q-learning algorithms learn the optimal policy for an environment with stochastic state transitions in scenarios where the goal is to maximise the Scalarised Expected Return (SER) - that is, to maximise the average outcome over multiple runs rather than the outcome within each individual episode. The analysis of the interaction between stochastic environment and MORL Q-learning algorithms run on a simple Multi-objective Markov decision process (MOMDP) Space Traders problem with different variant versions. The empirical evaluations show that well designed reward signal can improve the performance of the original baseline algorithm, however it is still not enough to address more general environment. A variant of MORL Q-Learning incorporating global statistics is shown to outperform the baseline method in original Space Traders problem, but remains below 100 percent effectiveness in finding the find desired SER-optimal policy at the end of training. On the other hand, Option learning is guarantied to converge to desired SER-optimal policy but it is not able to scale up to solve more complex problem in real-life. The main contribution of this thesis is to identify the extent to which the issue of noisy Q-value estimates impacts on the ability to learn optimal policies under the combination of stochastic environments, non-linear utility and a constant learning rate.