 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unifying Formalism for Shortest Path Problems with Expensive Edge Evaluations via Lazy Best-First Search over Paths with Edge Selectors
Paper and Code
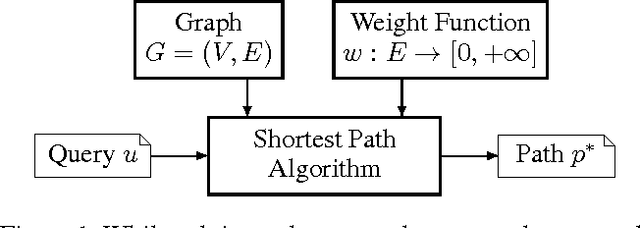



While the shortest path problem has myriad applications, the computational efficiency of suitable algorithms depends intimately on the underlying problem domain. In this paper, we focus on domains where evaluating the edge weight function dominates algorithm running time. Inspired by approaches in robotic motion planning, we define and investigate the Lazy Shortest Path class of algorithms which is differentiated by the choice of an edge selector function. We show that several algorithms in the literature are equivalent to this lazy algorithm for appropriate choice of this selector. Further, we propose various novel selectors inspired by sampling and statistical mechanics, and find that these selectors outperform existing algorithms on a set of example problems.