 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Trident Quaternion Framework for Inertial-based Navigation Part II: Error Models and Application to Initial Alignment
Paper and Code
Feb 24, 2021
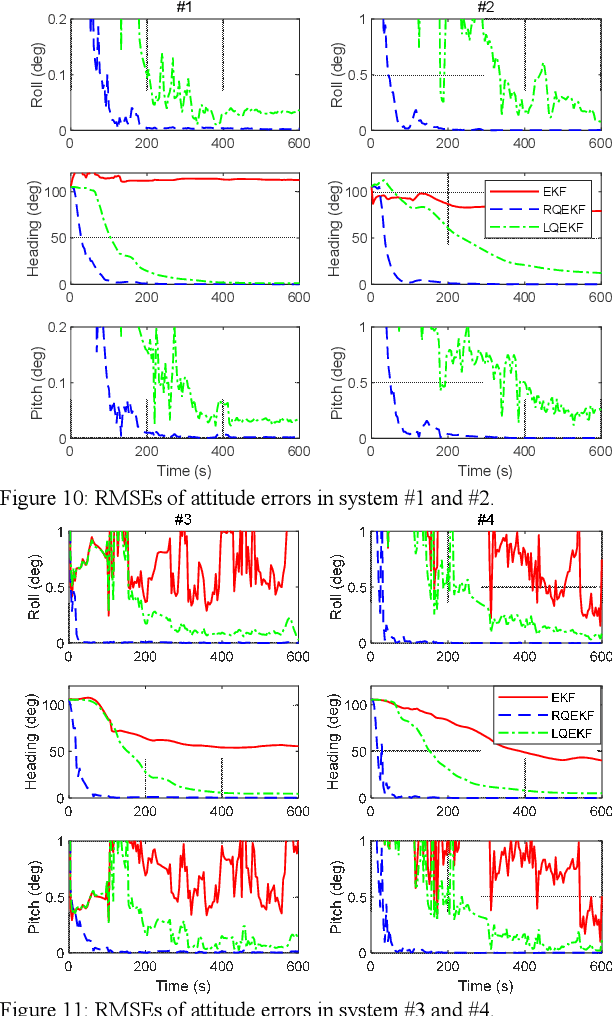
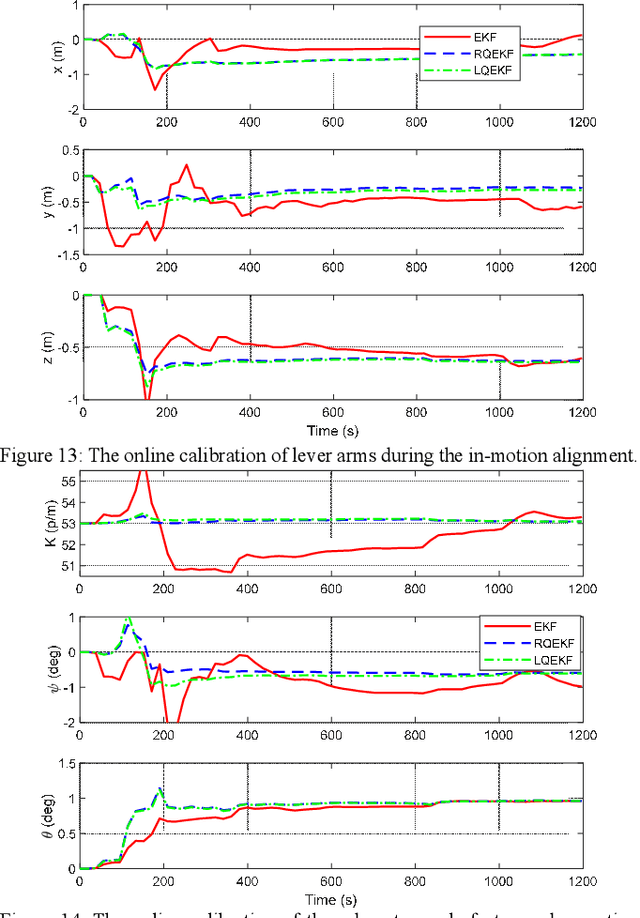
This work deals with error models for trident quaternion framework proposed in the companion paper "A Trident Quaternion Framework for Inertial-based Navigation Part I: Motion Representation and Computation" and further uses them to investigate the static and in-motion alignment for land vehicles. Specifically, the zero-velocity and odometer velocity measurements are applied in the static and in-motion alignment process, respectively. By linearizing the trident quaternion kinematic equation, the right and left trident quaternion error models are obtained. The resultant models are found to be equivalent to those derived from profound group affine. Then the two models are used to design the corresponding extended Kalman filters (EKF), namely, the left-quaternion EKF (LQEKF) and the right-quaternion EKF (RQEKF). Simulations and field tests are conducted to evaluate their actual performances. For the static alignment, owing to their high consistency, the L/RQEKF converge much faster than the EKF even without any heading information. For the in-motion alignment, however, the two filters still need the assistance of the analytical/optimization-based in-motion alignment methods at the very start to avoid extremely large attitude errors, although they possess much larger convergence region than the traditional EKF does.