 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA study of influential factors in designing self-reconfigurable robots for green manufacturing
Paper and Code
Apr 17, 2020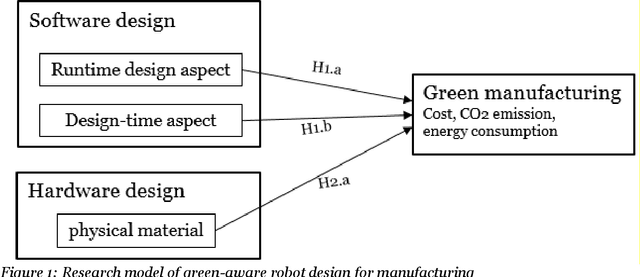
There is incremental growth in adopting self-reconfigurable robots in automating manufacturing conventional product lines. Using this class of robots adapting themselves with ever-changing environmental conditions has been acclaimed as a promising way of reducing energy consumption and environmental impact and thus enabling green manufacturing. Whilst the majority of existing research focuses on highlighting the efficacy of self-reconfigurable robots in energy reduction with technical driven solutions, the research on exploring the salient factors in design and development self-reconfigurable robots that directly enable or hinder green manufacturing is non-extant. This interdisciplinary research contributes to the nascent body of the knowledge by empirical investigation of design-time, run-time, and hardware aspects which should be contingently balanced when developing green-aware self-reconfigurable robots. Keywords Green manufacturing, self-reconfigurable robots, robot design, green awareness