 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA probabilistic model for missing traffic volume reconstruction based on data fusion
Paper and Code
May 06, 2021


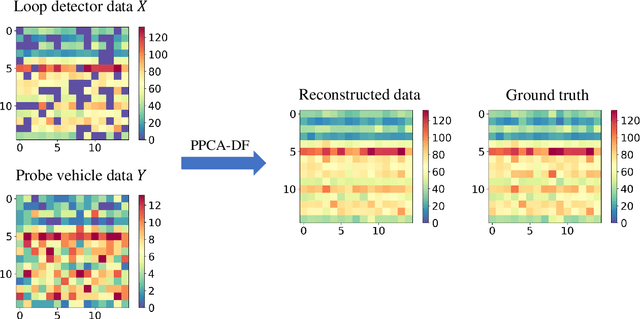
Traffic volume information is critical for intelligent transportation systems. It serves as a key input to transportation planning, roadway design, and traffic signal control. However, the traffic volume data collected by fixed-location sensors, such as loop detectors, often suffer from the missing data problem and low coverage problem. The missing data problem could be caused by hardware malfunction. The low coverage problem is due to the limited coverage of fixed-location sensors in the transportation network, which restrains our understanding of the traffic at the network level. To tackle these problems, we propose a probabilistic model for traffic volume reconstruction by fusing fixed-location sensor data and probe vehicle data. We apply the probabilistic principal component analysis (PPCA) to capture the correlations in traffic volume data. An innovative contribution of this work is that we also integrate probe vehicle data into the framework, which allows the model to solve both of the above-mentioned two problems. Using a real-world traffic volume dataset, we show that the proposed method outperforms state-of-the-art methods for the extensively studied missing data problem. Moreover, for the low coverage problem, which cannot be handled by most existing methods, the proposed model can also achieve high accuracy. The experiments also show that even when the missing ratio reaches 80%, the proposed method can still give an accurate estimate of the unknown traffic volumes with only a 10% probe vehicle penetration rate. The results validate the effectiveness and robustness of the proposed model and demonstrate its potential for practical applications.