 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA New Solution to the Relative Orientation Problem using only 3 Points and the Vertical Direction
Paper and Code
May 25, 2009

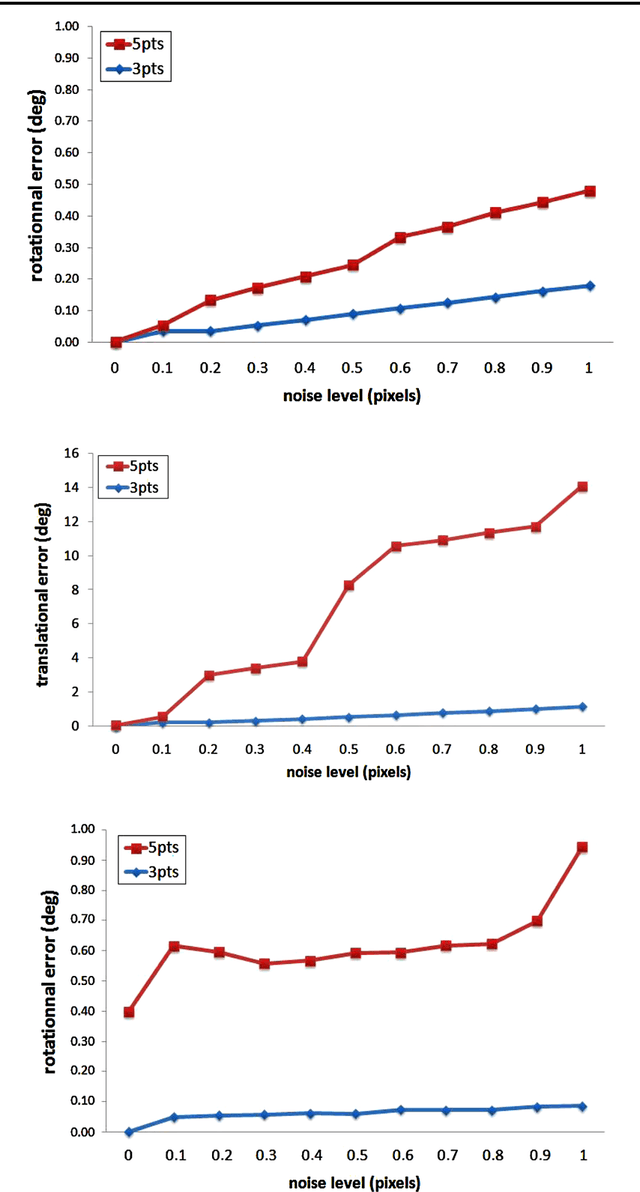
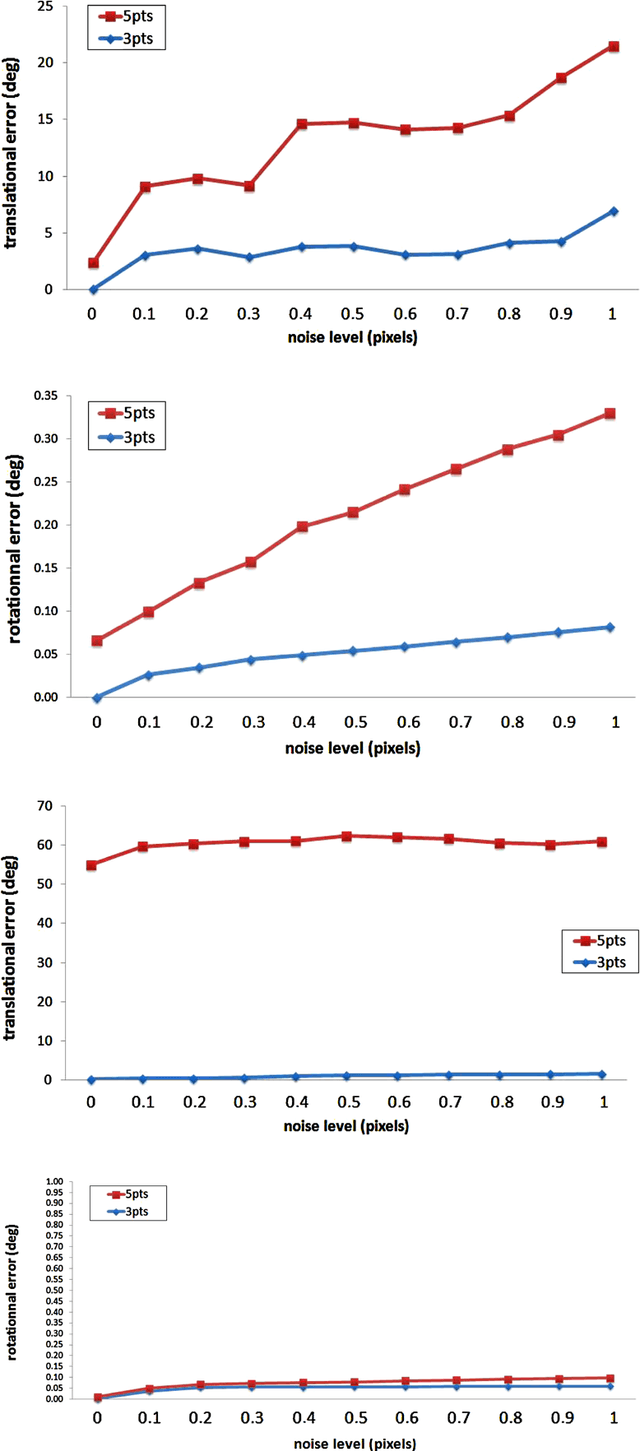
This paper presents a new method to recover the relative pose between two images, using three points and the vertical direction information. The vertical direction can be determined in two ways: 1- using direct physical measurement like IMU (inertial measurement unit), 2- using vertical vanishing point. This knowledge of the vertical direction solves 2 unknowns among the 3 parameters of the relative rotation, so that only 3 homologous points are requested to position a couple of images. Rewriting the coplanarity equations leads to a simpler solution. The remaining unknowns resolution is performed by an algebraic method using Grobner bases. The elements necessary to build a specific algebraic solver are given in this paper, allowing for a real-time implementation. The results on real and synthetic data show the efficiency of this method.