 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Hybrid, PDE-ODE Control Strategy for Intercepting an Intelligent, well-informed Target in a Stationary, Cluttered Environment
Paper and Code
Aug 20, 2016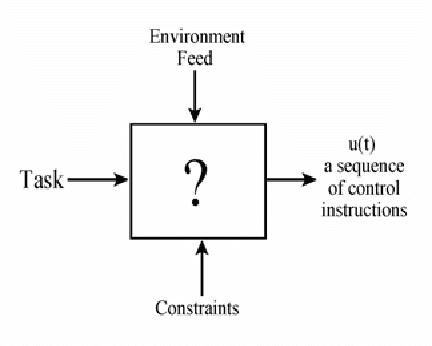
In [1,2] a new class of intelligent controllers that can semantically embed an agent in a spatial context constraining its behavior in a goal-oriented manner was suggested. A controller of such a class can guide an agent in a stationary unknown environment to a fixed target zone along an obstacle-free trajectory. Here, an extension is suggested that would enable the interception of an intelligent target that is maneuvering to evade capture amidst stationary clutter (i.e. the target zone is moving). This is achieved by forcing the differential properties of the potential field used to induce the control action to satisfy the wave equation. Background of the problem, theoretical developments, as well as, proofs of the ability of the modified control to intercept the target along an obstacle-free trajectory are supplied. Simulation results are also provided.