 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Harmonic Potential Approach For Simultaneous Planning And Control Of A Generic UAV Platform
Paper and Code
Jun 29, 2016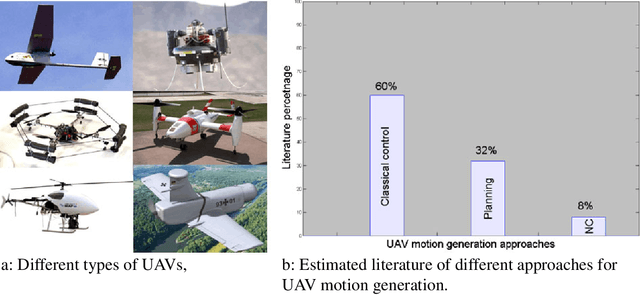
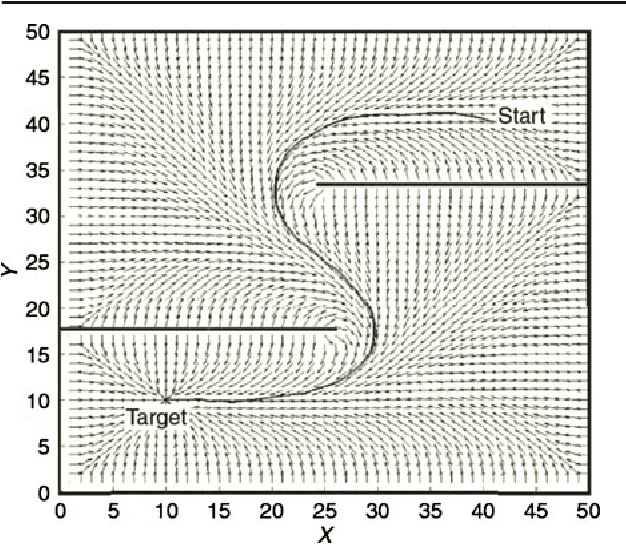
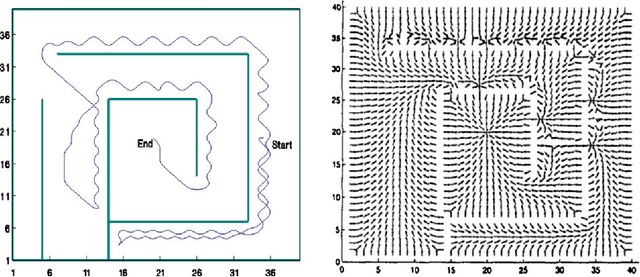
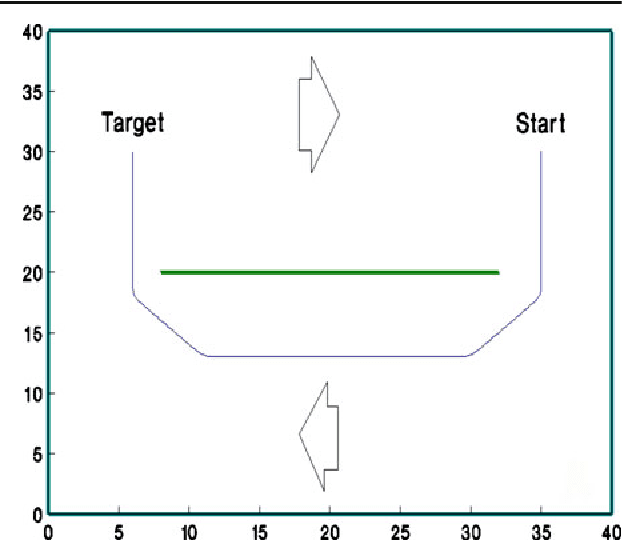
Simultaneous planning and control of a large variety of unmanned aerial vehicles (UAVs) is tackled using the harmonic potential field (HPF) approach. A dense reference velocity field generated from the gradient of an HPF is used to regulate the velocity of the UAV concerned in a manner that would propel the UAV to a target point while enforcing the constraints on behavior that were a priori encoded in the reference field. The regulation process is carried-out using a novel and simple concept called the: virtual velocity attractor (VVA). The combined effect of the HPF gradient and the VVA is found able to yield an efficient, easy to implement, well-behaved and provably-correct context-sensitive control action that suits a wide variety of UAVs. The approach is developed and basic proofs of correctness are provided along with simulation results.