 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Convolutional Neural Network Approach Towards Self-Driving Cars
Paper and Code
Sep 09, 2019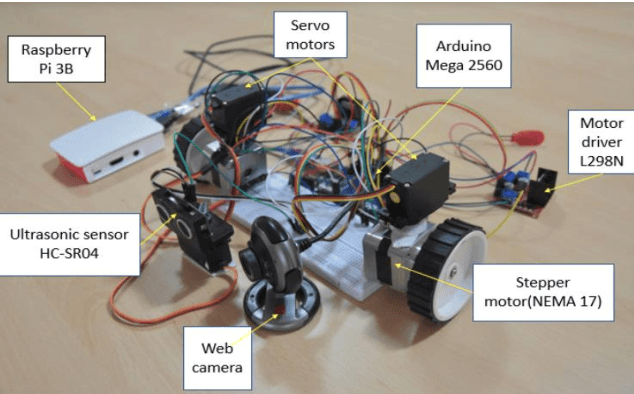
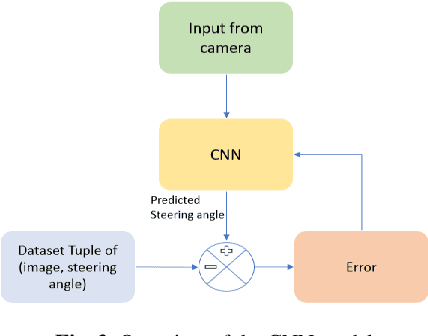
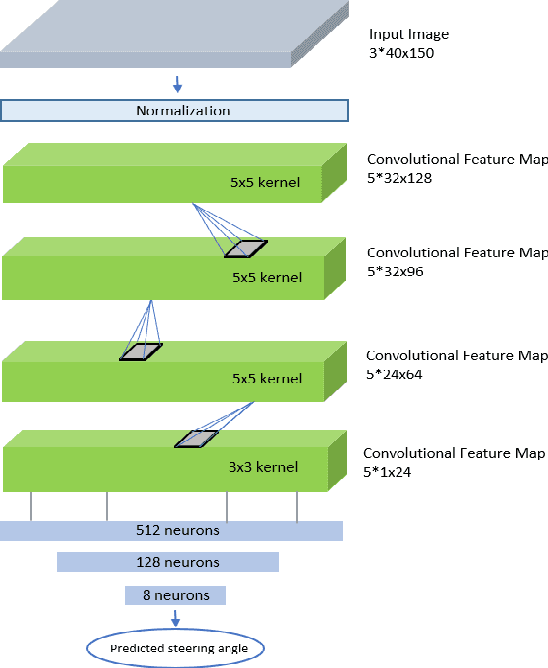
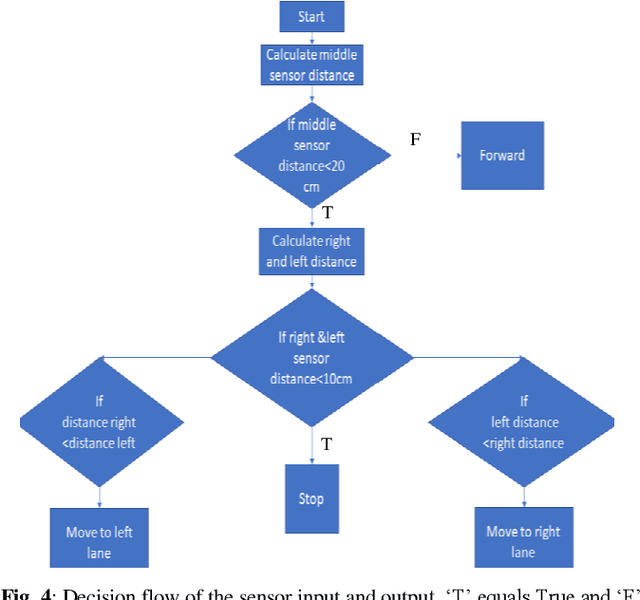
A convolutional neural network (CNN) approach is used to implement a level 2 autonomous vehicle by mapping pixels from the camera input to the steering commands. The network automatically learns the maximum variable features from the camera input, hence requires minimal human intervention. Given realistic frames as input, the driving policy trained on the dataset by NVIDIA and Udacity can adapt to real-world driving in a controlled environment. The CNN is tested on the CARLA open-source driving simulator. Details of a beta-testing platform are also presented, which consists of an ultrasonic sensor for obstacle detection and an RGBD camera for real-time position monitoring at 10Hz. Arduino Mega and Raspberry Pi are used for motor control and processing respectively to output the steering angle, which is converted to angular velocity for steering.