Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA comparative study of the performance of different search algorithms on FOON graphs
Paper and Code
Oct 14, 2022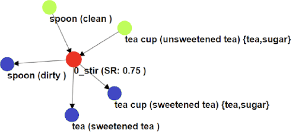
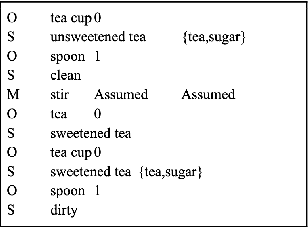
A robot finds it really hard to learn creatively and adapt to the new unseen challenges. This is mainly because of the very limited information it has access or experience towards. Paulius et al. \cite{b4} presented a way to construct functional graphs which can encapsulate. Sakib et al. \cite{b1} further expanded FOON objects for robotic cooking. This paper presents a comparative study of Breadth First Search (BFS), Greedy Breadth First search (GBFS) with two heuristic functions, and Iterative Depth First Search (IDFS) and provides the comparison of their performance.
View paper on