 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Rapidly-exploring Random Tree Algorithms Applied to Ship Trajectory Planning and Behavior Generation
Paper and Code



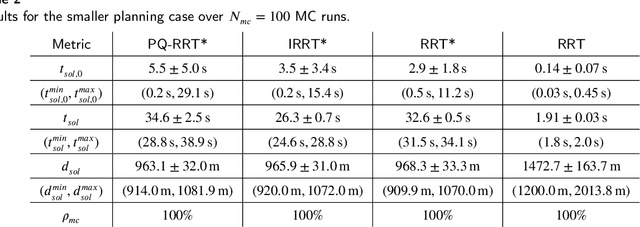
Rapidly Exploring Random Tree (RRT) algorithms are popular for sampling-based planning for nonholonomic vehicles in unstructured environments. However, we argue that previous work does not illuminate the challenges when employing such algorithms. Thus, in this article, we do a first comparison study of the performance of the following previously proposed RRT algorithm variants; Potential-Quick RRT* (PQ-RRT*), Informed RRT* (IRRT*), RRT* and RRT, for single-query nonholonomic motion planning over several cases in the unstructured maritime environment. The practicalities of employing such algorithms in the maritime domain are also discussed. On the side, we contend that these algorithms offer value not only for Collision Avoidance Systems (CAS) trajectory planning, but also for the verification of CAS through vessel behavior generation. Naturally, optimal RRT variants yield more distance-optimal paths at the cost of increased computational time due to the tree wiring process with nearest neighbor consideration. PQ-RRT* achieves marginally better results than IRRT* and RRT*, at the cost of higher tuning complexity and increased wiring time. Based on the results, we argue that for time-critical applications the considered RRT algorithms are, as stand-alone planners, more suitable for use in smaller problems or problems with low obstacle congestion ratio. This is attributed to the curse of dimensionality, and trade-off with available memory and computational resources.