Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Comparative Study of Coarse to Dense 3D Indoor Scene Registration Algorithms
Paper and Code
Oct 28, 2021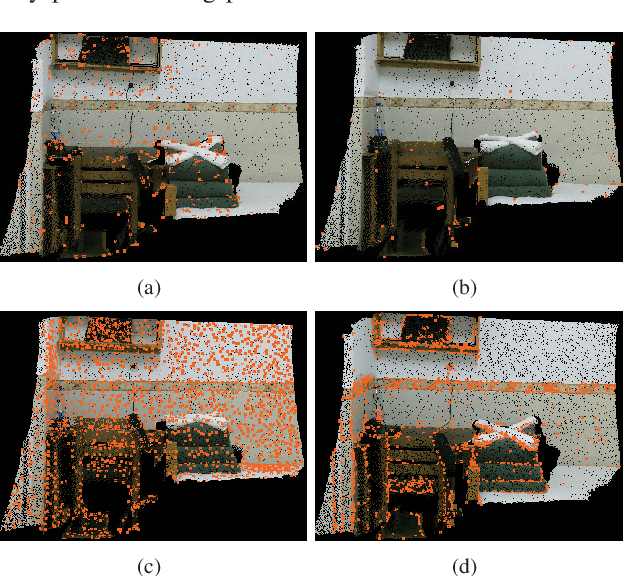

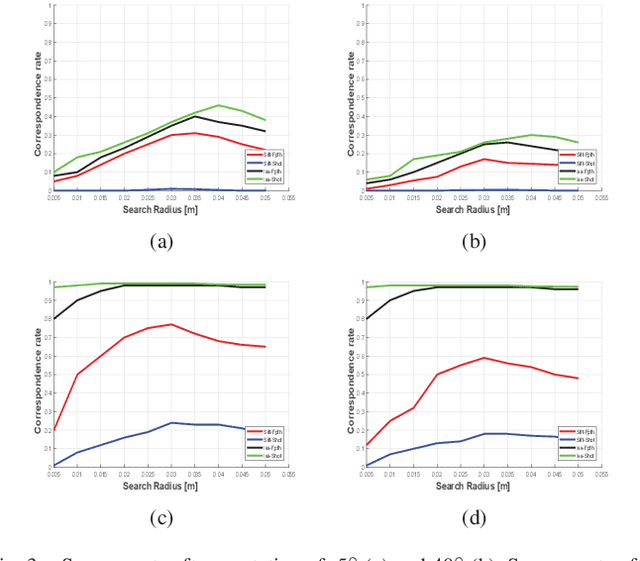
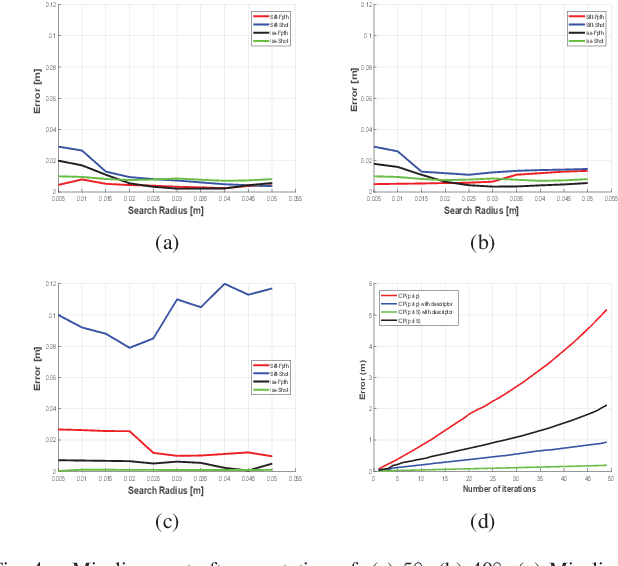
3D alignment has become a very important part of 3D scanning technology. For instance, we can divide the alignment process into four steps: key point detection, key point description, initial pose estimation, and alignment refinement. Researchers have contributed several approaches to the literature for each step, which suggests a natural need for a comparative study for an educated more appropriate choice. In this work, we propose a description and an evaluation of the different methods used for 3D registration with special focus on RGB-D data to find the best combinations that permit a complete and more accurate 3D reconstruction of indoor scenes with cheap depth cameras.
* In 2019 International Conference on Advanced Electrical
Engineering (ICAEE) (pp. 1-6). IEEE (2019) * Accepted in International Conference on Advanced Electrical
Engineering (ICAEE)
View paper on