 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4DPV: 4D Pet from Videos by Coarse-to-Fine Non-Rigid Radiance Fields
Paper and Code
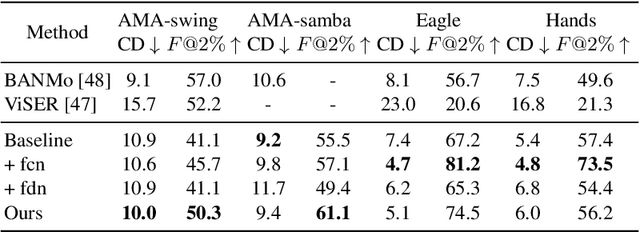
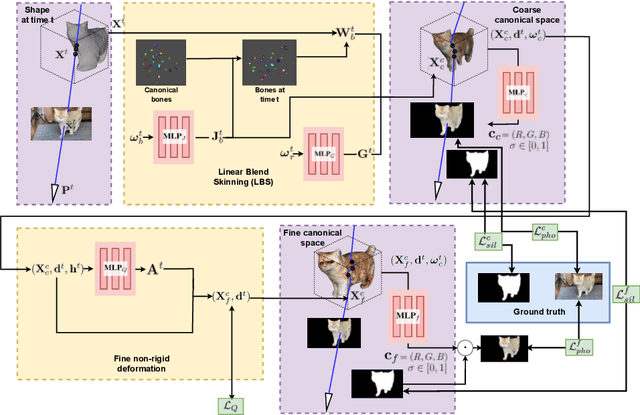
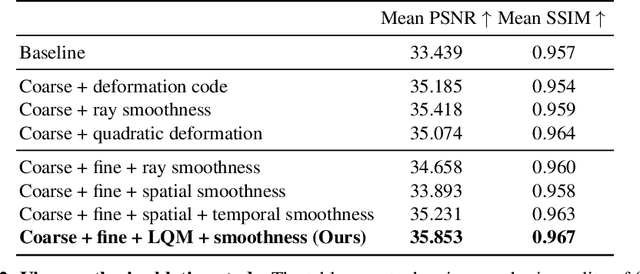
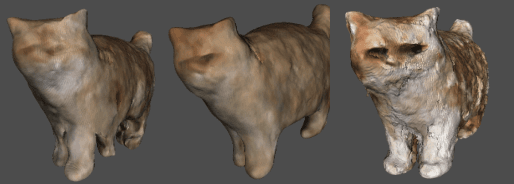
We present a coarse-to-fine neural deformation model to simultaneously recover the camera pose and the 4D reconstruction of an unknown object from multiple RGB sequences in the wild. To that end, our approach does not consider any pre-built 3D template nor 3D training data as well as controlled illumination conditions, and can sort out the problem in a self-supervised manner. Our model exploits canonical and image-variant spaces where both coarse and fine components are considered. We introduce a neural local quadratic model with spatio-temporal consistency to encode fine details that is combined with canonical embeddings in order to establish correspondences across sequences. We thoroughly validate the method on challenging scenarios with complex and real-world deformations, providing both quantitative and qualitative evaluations, an ablation study and a comparison with respect to competing approaches. Our project is available at https://github.com/smontode24/4DPV.