 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge2D Floor Plan Segmentation Based on Down-sampling
Paper and Code
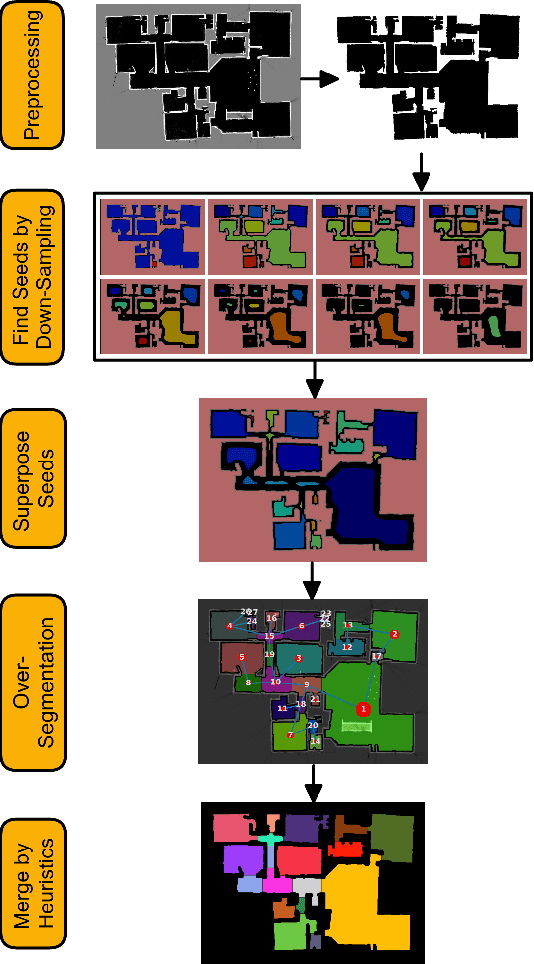
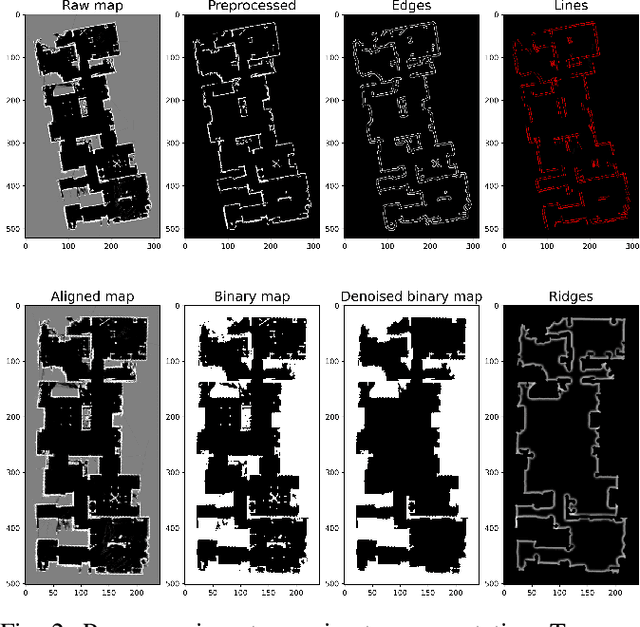
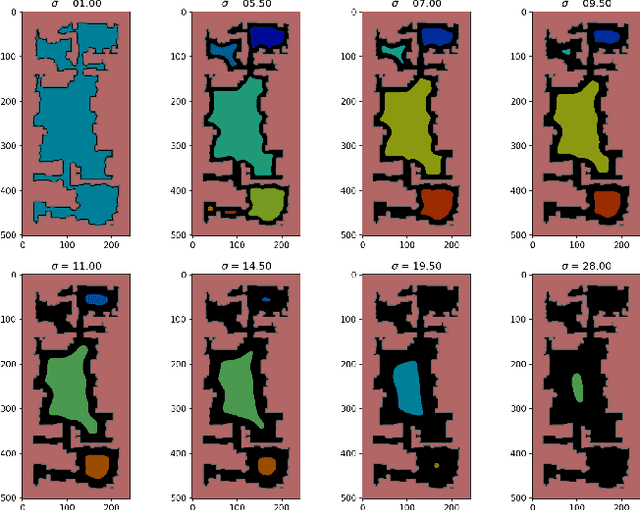
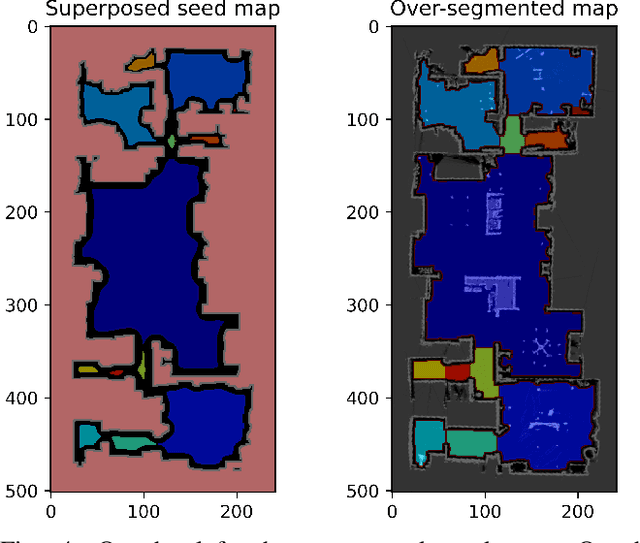
In recent years, floor plan segmentation has gained significant attention due to its wide range of applications in floor plan reconstruction and robotics. In this paper, we propose a novel 2D floor plan segmentation technique based on a down-sampling approach. Our method employs continuous down-sampling on a floor plan to maintain its structural information while reducing its complexity. We demonstrate the effectiveness of our approach by presenting results obtained from both cluttered floor plans generated by a vacuum cleaning robot in unknown environments and a benchmark of floor plans. Our technique considerably reduces the computational and implementation complexity of floor plan segmentation, making it more suitable for real-world applications. Additionally, we discuss the appropriate metric for evaluating segmentation results. Overall, our approach yields promising results for 2D floor plan segmentation in cluttered environments.